Global Snapshot Algorithm: Details
This webpage gives some details of the global snapshot algorithm.
Global Snapshot: Details
This webpage gives a code outline for the global snapshot algorithm and gives examples of steps in the algorithm.Code Structure
The code outline is given below in Python. channels_recorded is a dict (dictionary), where channels_recorded[sender] becomes True when the snapshot for the channel from this sender has finished being recorded. channel_snapshots is a dict where channel_snapshots[sender] is the ongoing recording of the snapshot of the channel from the sender.
taken_local_snapshot = False
channel_snapshots = {key: [] for key in predecessors}
channels_recorded = {key: False for key in predecessors}
start()
def receive(message, sender):
if isinstance(message, Marker) and not taken_local_snapshot:
local_snapshot = record_state()
taken_local_snapshot = True
channels_recorded[sender] = True
output_message = Marker()
for receiver in successors:
send(output_message, receiver)
elif isinstance(message, Marker) and taken_local_snapshot:
channels_recorded[sender] = True
else:
if taken_local_snapshot and not channels_recorded[sender]:
channel_snapshots[sender] = \\
channel_snapshots[sender].append(message)
The remainder of this webpage consists of examples.
Examples
Example: Snapshots may change a Client's Computation
This example shows that the OS algorithm may change a client's computation though it does not change the client's dataflow.
Figure 2 is a representation of a computation with event sequence
\([0, 1, 2, \ldots, ]\) and agents \(X, Y, Z\) without a concurrent OS
algorithm, and figure 3 shows how the OS changes this computation.
Events later in the computation are placed to the
right of earlier events.
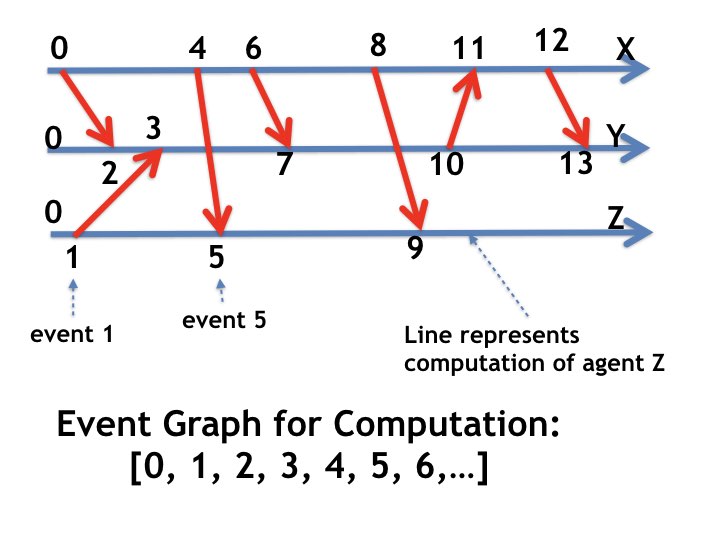
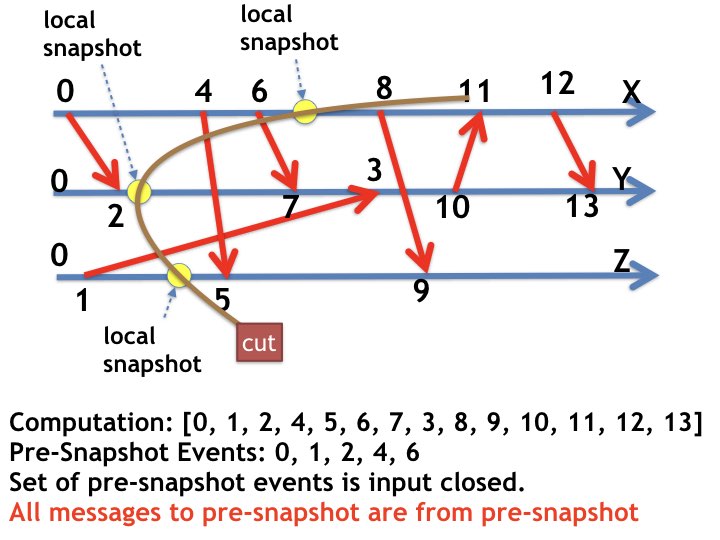
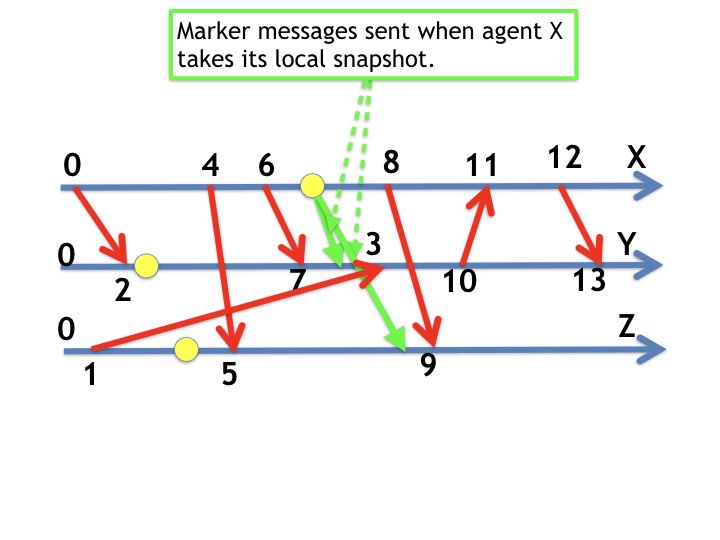
Figure 3 shows how a client's computation is changed when the OS takes
snapshots.
The local snapshots taken by agents are shown as a yellow
circle on the agents' timelines.
The OS delays event 3 so that it occurs after events 4, 5, 6, and 7,
as shown in the figure.
The OS changes the computation, but it does not change the dataflow.
Example: Steps in a Global Snapshot Algorithm: Initiation
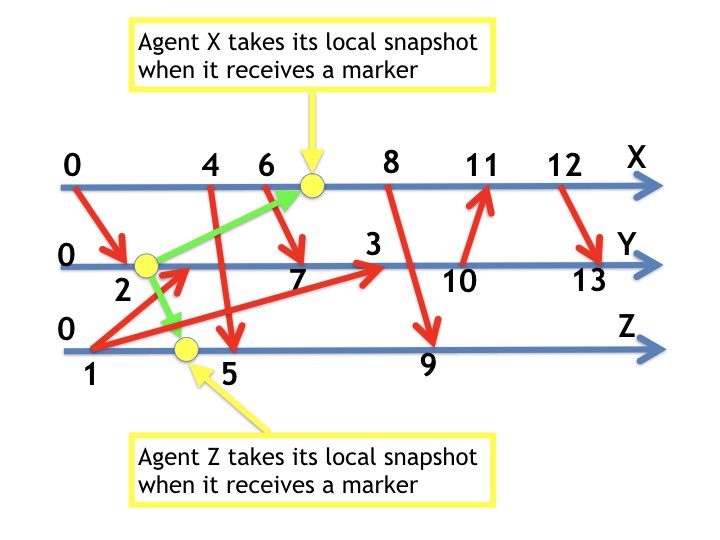
Figure 4 illustrates the first step of the algorithm.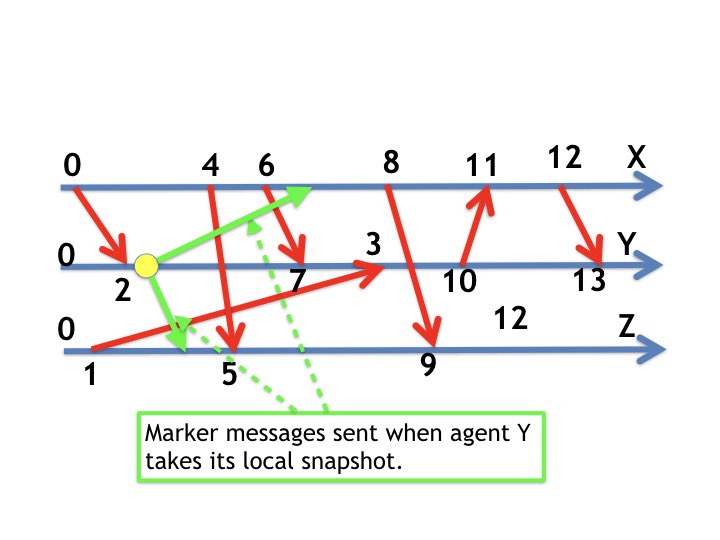
When agents X and Z each receive the markers, they take their local
snapshots because they haven't taken snapshots earlier.
Example: Agents take Snapshots upon Receiving Markers
When X and Z take their snapshots they send markers out on their
output channels.
The markers sent by X are shown in figure 7.
The markers sent by Z are not shown in the figure.
Example: Snapshot of a Channel
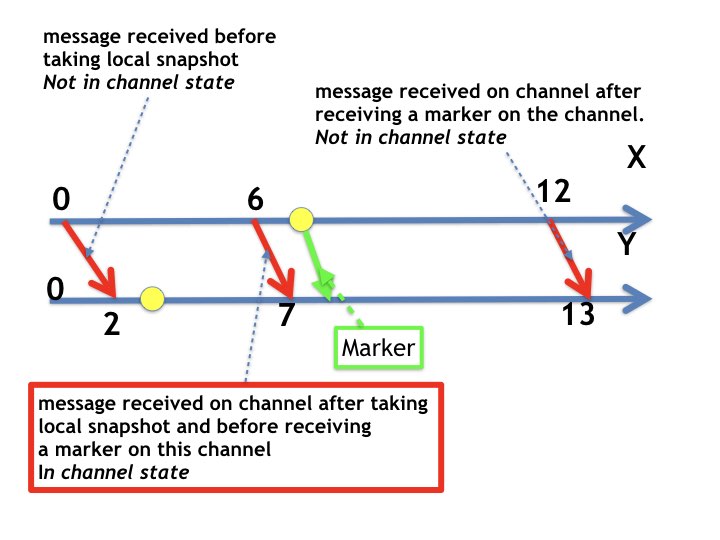
Figure 8 shows how agent Y determines the state of the channel from X
to Y in the global snapshot.
Y starts recording the messages it receives along this channel after Y
takes its snapshot and stops the recording when it receives a marker
on this channel
The only message in this interval is the message corresponding to edge
(6, 7).
Next
Next logical clocks.K. Mani Chandy, Emeritus Simon Ramo Professor, California Institute of Technology