Distributed Dining Philosophers
Key Concepts
1. Mutual Exclusion
The distributed dining philosophers is a generalization of the mutual exclusion problem to distributed systems. A mutual exclusion or mutex problem is one in which only one agent can carry out some activity such as executing a critical section of a program. Mutex algorithms ensure that all agents that want to carry out such activities do so eventually.2. Priorities among Agents
Distributed conflict-resolution algorithms ensure that when multiple agents are in a conflict that only one of them can win, every agent wins eventually. A standard way of managing conflicts is to have agents agree on relative priorities among themselves; the agent with higher priority wins.Distributed algorithms often use a good-neighbor policy to ensure that all agents win conflicts eventually: An agent that wins a conflict makes its priority lower than the priorities of all the agents with which it competes.
3. Tokens and What Agents Know
An agent can resolve a conflict with other agents only if it knows something about the states of other agents. For example, what agents want to enter a critical section and what are their priorities? What agents know is defined in this module. We used the concept of tokens to illustrate what agents know. A system has a fixed number of indivisible tokens which are neither created nor destroyed. An agent that holds a token knows that no other agent holds that token. This knowledge is at the core of many conflict resolution algorithms.The Problem
Agent States in a Mutual Exclusion Problem
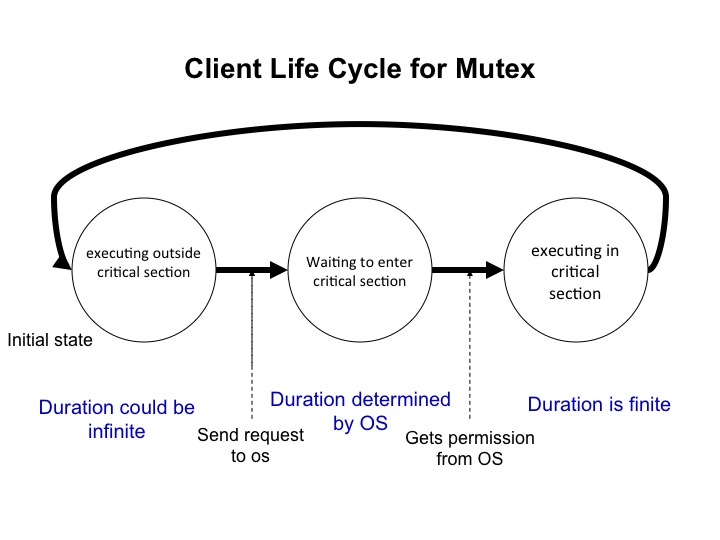
- Outside critical section: The agent is executing outside its critical section. An agent can remain in this state for ever, or it may transit after finite time to the next state: waiting to enter its critical section.
- Waiting to enter critical section: The agent waits to enter critical section until it is given permission to do so by the operating system.
- In critical section: The agent executes in its critical section. An agent does not remain in its critical section forever. It does so for only finite time after which it transits to the state, outside critical section.
Clients determine transitions from outside critical section to waiting to enter critical section, and from in critical section to outside critical section. The operating system determines transitions from waiting to enter critical section to outside critical section.
Agent States in the Dining PhilosophersProblem
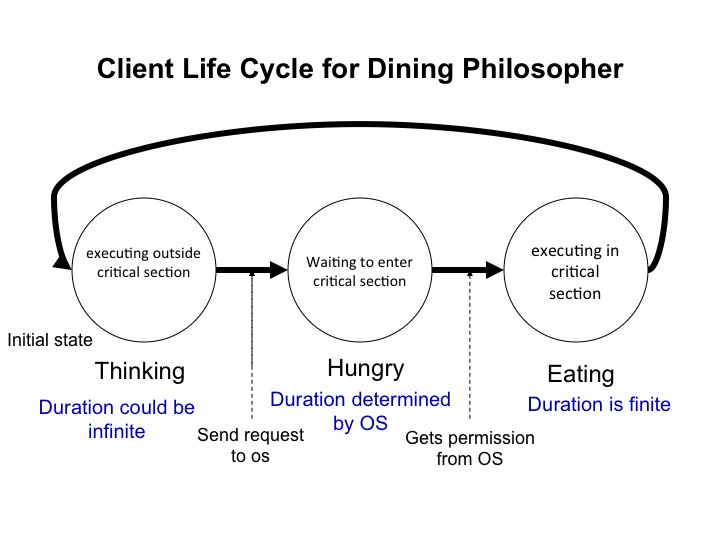
The states "Thinking", "Hungry", and "Eating" correspond exactly to Outside critical section, Waiting to enter critical section, and In critical section, respectively.
Agent Communication Structure
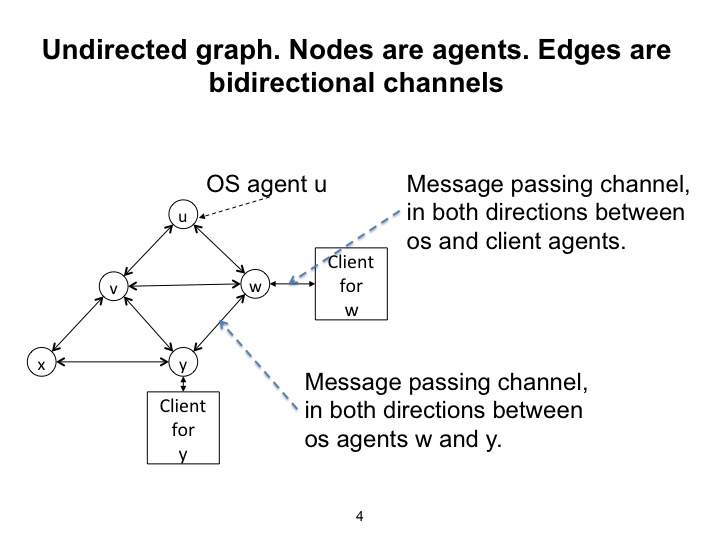
A pair of OS agents are neighbors when there is an edge between them. A pair of client agents are neighbors when the OS agents with which they are associated are neighbors. For example, in the figure, \(w\) and \(y\) are neighbors.
Specification
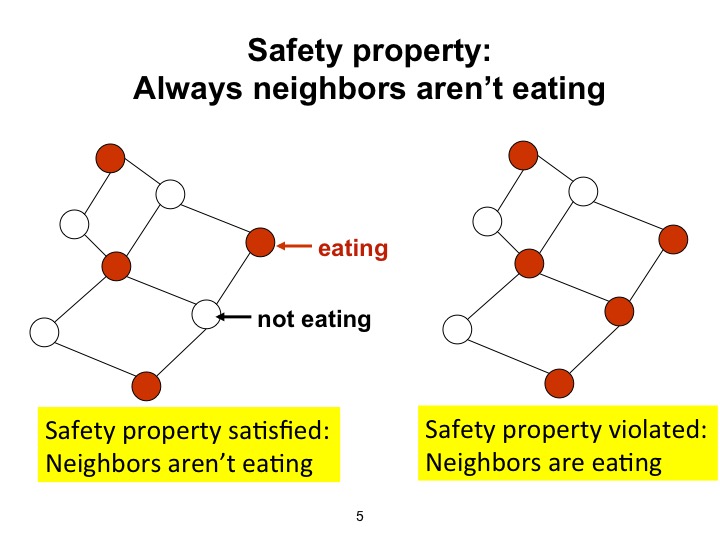
Safety: Neighbors do not eat at the same time
Let \(safe\) be the predicate Neighboring clients are not eating, and let \(init\) be a predicate that holds initially.The safety part of the specification is that \(safe\) holds in every state in every path from every initial state:
\([init \Rightarrow A(safe)]\)
Progress: Hungry agents eat eventually
The progress part of the specification is that every hungry agent transits to eating state eventually.
For every agent \(v\):
\(
v.state = hungry \quad \leadsto \quad v.state = eating
\)
Example of Safety
The Client's Program
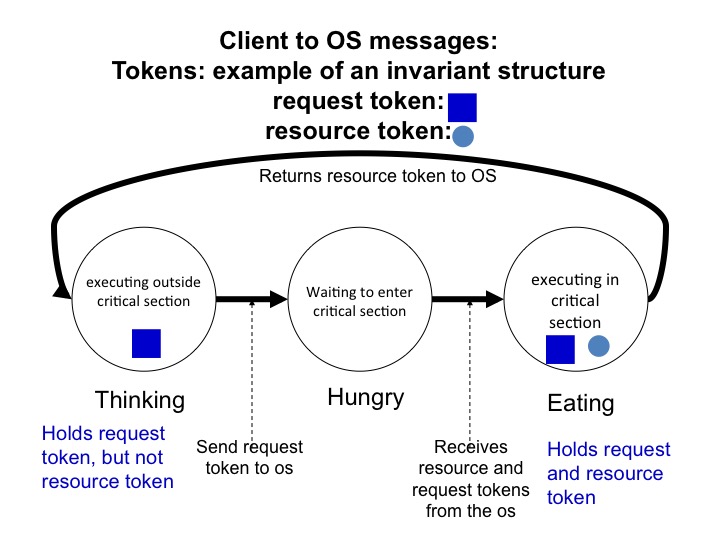
We use two tokens that move between a client and its OS agent. The tokens are called the resource token and the request token. The client's states are represented by which tokens the client holds.
- Thinking State: A thinking client holds the request token but not the resource token.
- Transition: Thinking to Hungry: Send the request token to the OS.
- Hungry State: The client holds neither the request nor the resource token.
- Transition Hungry to Eating: The client transits to eating when it receives both the request and resource token.
- Eating: The client holds both the request and resource tokens.
- Transition from Eating to Thinking: The client holds sends the resource token to the OS and continues to hold the request token.
What the OS Knows
While the OS agent holds the request token it knows that its client is hungry. While the OS agent holds the resource token it knows that its client is not eating.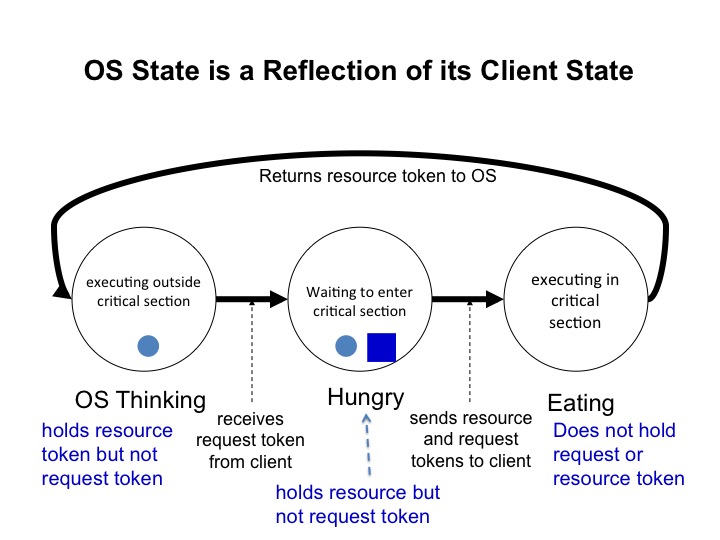
When a client transits from thinking to hungry it sends its request token to the agent. When the OS receives the request token, the OS also has the resource token; so the OS knows that its client is hungry. There is an interval after the client sends the request token and before the OS receives it during which the client is hungry but the OS doesn't know that. An OS agent does not need to know what state its client is in at every point. Likewise, a client does not need to know its OS agent's state at every point.
A client is hungry leads-to its OS agent knowing that its client is hungry. The leads-to captures the fact that the OS doesn't know the client's state at the instant that the client transitions from thinking to hungry.
Introduction of Tokens
We introduce a token on each edge of the agent communication graph, see figure 4. The token on an edge \(v, w\) is in one of four states: held by \(v\), in the channel from \(v\) to \(w\), held by \(w\), or in the channel from \(w\) to \(v\). Therefore while \(v\) holds this token it knows that \(w\) doesn't hold it. Likewise, while \(w\) holds this token it knows that \(v\) doesn't.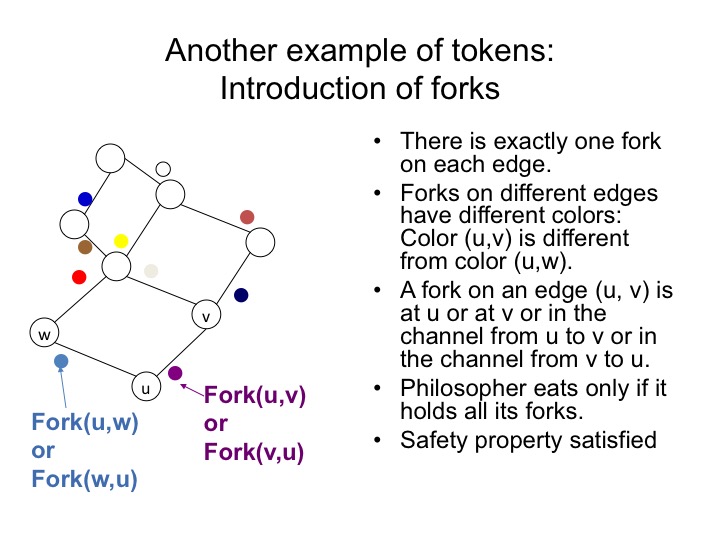
These tokens are called forks. (They are called chopsticks in some papers.) An agent eats only if it holds forks for all the edges incident on it. Therefore, while an agent eats none of its neighbors do, and so the safety specification is satisfied.
Key Question: When does a hungry agent yield forks?
An eating philosopher holds on to all its forks until it finishes eating. A thinking philosopher can give a fork to a neighbor that requests it. So the key question is: Under what conditions should a hungry neighbor give a fork that it holds to a neighbor that requests it?
Suppose every hungry agent gives a fork to a neighbor that requests
it. Then we can get the scenario shown in the figure below.
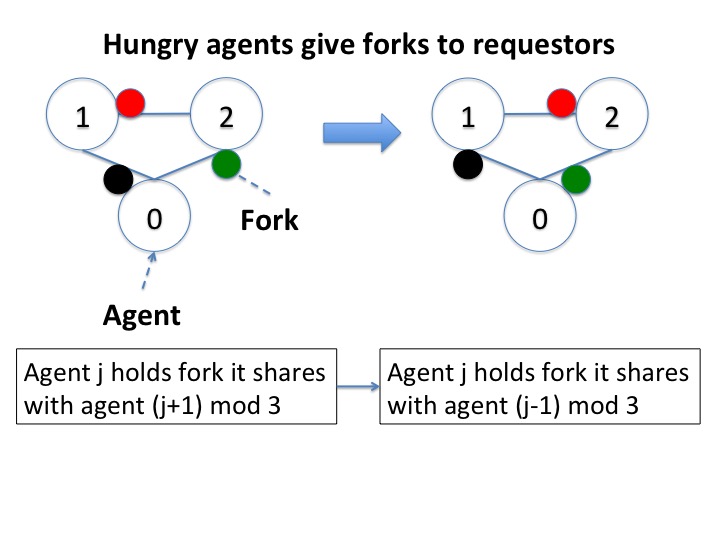
If hungry agents don't yield forks then the state on the left persists for ever. In this case too, hungry agents starve.
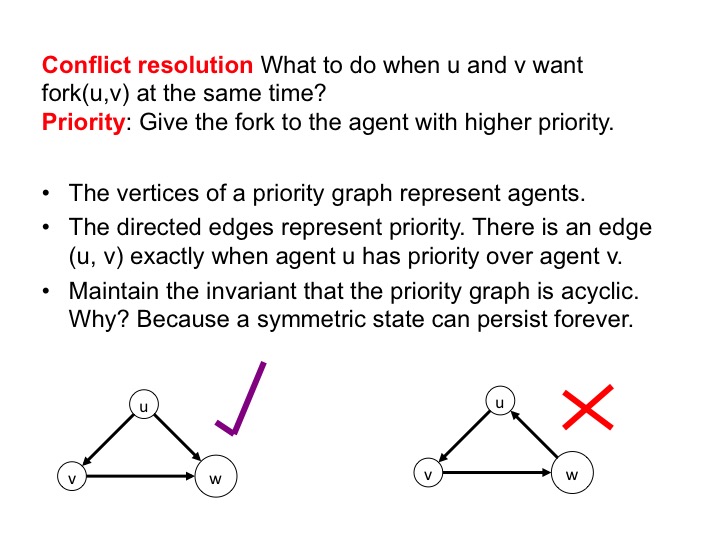
Creating a Partial Order of Priorities
Let's assign priorities to agents so that a hungry agent \(v\) releases a fork to a neighbor \(w\) only if \(v\) has lower priority than \(w\). If there is a cycle of agents, all with the same priority, then we get the situation shown in figure 8. So, we will ensure that priorities form a partial order in all states in all transitions. Priorities form a partial order exactly when the priority graph is acyclic. The graph has an edge from \(v\) to \(w\) exactly when \(v\) has higher priority over \(w\).
In the figure below, the diagram on the left shows an acyclic priority
graph while the one on the right shows a graph with a cycle.
How should Priorities Change?
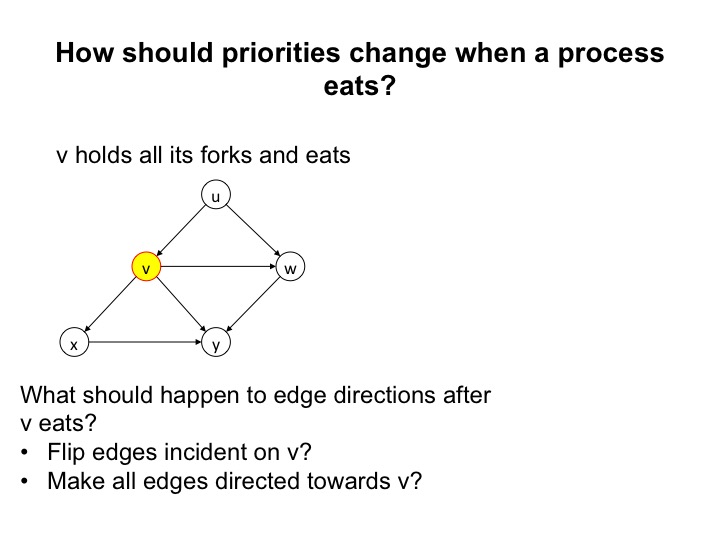
What happens if we flip the directions of the edges incident on \(v\)? After the flip, the edges are directed from \(w\), \(x\) and \(y\) towards \(v\), and from \(v\) to \(u\). But now we have a cycle: \(y\) to \(v\) to \(u\) to \(w\) to \(y\). So, flipping edge directions doesn't work.
What happens if agents adopt the good neighbor policy?
The winner of a conflict gives itself lower priority than all the agents
with which it competes. So, an agent that starts eating gives itself lower
priority than all its neighbors. All edges point towards an eating
agent.
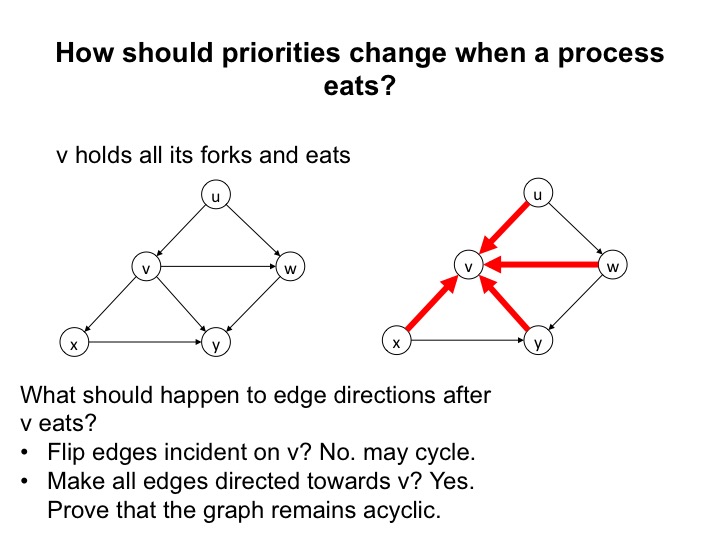
For example, in the figure directing all edges incident on vertex \(v\) towards \(v\) ensures that no new cycle is created.
Agent's priority does not decrease until the agent eats.
How an Agent knows its Priority
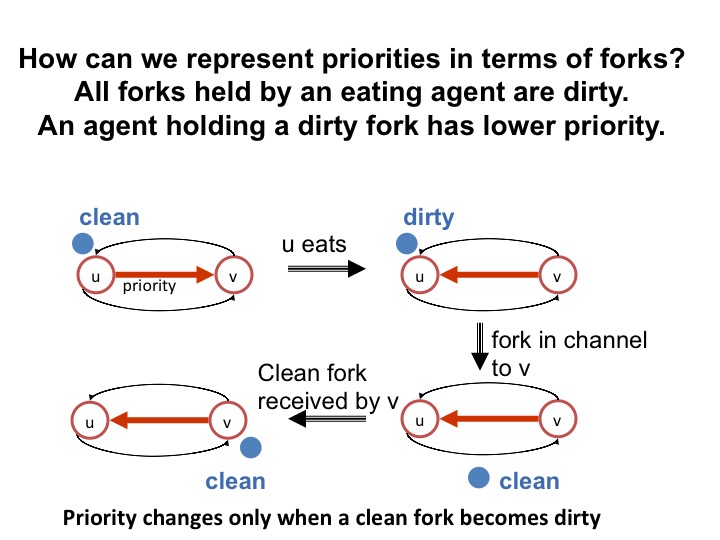
We assign an attribute clean / dirty to forks. A fork is either dirty or clean. The forks held by an eating agent are dirty. When an agent receives a fork from another agent, the receiving agent cleans the fork. So the receiver holds a clean fork, and the fork remains clean until an agent next eats with it. (This is the "hygenic solution:" Another - sad? - attempt at CS humor.)An agent holding a dirty fork knows that it has lower priority than the agent with which it shares the fork. Likewise, an agent holding a clean fork knows that it has higher priority than the agent with which it shares the fork.
If an agent does not hold the fork that it shares with a neighbor then the agent does not know its priority with respect to that neighbor.
Example of a Fork's Lifecycle
The diagram below shows states of a fork shared by agents \(u\) and \(v\). The red arrow shows priority, and the black arrows show channels. The blue dot represents the fork.In the figure on the top left, agent \(u\) is hungry and holds a clean fork. So, \(u\) knows that it has priority over \(v\). At this point \(v\) does not know whether \(v\) has priority over \(u\) or not.
The next figure, at the top right, shows that when \(u\) transits from hungry to eating, the fork becomes dirty, and \(u\) has lower priority than \(v\). Agent \(u\) continues to hold the fork while it eats.
The next figure, bottom right, shows the situation after \(u\) gets a request for the fork from \(v\). Because \(u\) got the request from \(v\) and \(u\) hasn't sent the fork to \(v\), agent \(u\) knows that \(v\) is hungry. Since the fork is dirty, \(u\) sends the fork to \(v\). The figure shows the fork in the channel from \(u\) to \(v\). While the fork is in the channel it doesn't matter whether the fork is clean or dirty; however, merely for convenience, let's assume that \(u\), being hygenic, cleans the fork before sending it to its partner. While the fork is in a channel the priority doesn't change but neither \(u\) nor \(v\) knows what the priority is.
The next figure, bottom left, shows the situation when \(v\) receives
the fork. Receiving the fork doesn't change the priority.
At this point \(v\) is hungry and the fork is
clean and so \(v\) knows that it has higher
priority. \(v\) holds on to the fork until it next eats.
Algorithm
Properties of Reachable States
Here is a list of some of the properties of states in all trajectories.- The priority graph is acyclic. \(u\) has priority over a neighbor \(v\) exactly when \(u\) holds the fork that it shares with \(v\) and the fork is clean, or the fork is in the channel from \(v\) to \(u\), or \(v\) holds the fork and the fork is dirty.
- Eating philosophers hold the forks for all edges incident on them, and these forks are dirty.
- All forks held by thinking philosphers are dirty.
- Thinking philosophers never send requests and never receive forks. Thinking philosophers respond to request for forks by sending the requested forks.
Initial States
Initially all philosophers are thinking; all forks are dirty; and all channels are empty. The forks are placed so that the priority graph is acyclic. The initial assignment of forks is as follows. Given an arbitrary acyclic graph, for any edge directed from \(v\) to \(w\), the fork shared by \(v\) and \(w\) is initially at \(w\) and the fork is dirty.Algorithm Commands
The algorithm is specified by the following commands.
- When a thinking philosophers gets a request for a fork that it holds it sends the fork. (A fork held by a thinking philosopher is dirty.)
- When a thinking philosopher transits to hungry it sends requests for all forks that it does not hold.
- When a hungry philosopher receives a fork, it records the fork as being clean. If the hungry philosopher holds all its forks, and if it has no request for any dirty fork that it holds, then it transits to eating, and records all the forks that it holds in the eating state as dirty.
- When a hungry philosopher receives a request for a fork that it holds, it sends the fork if the fork is dirty, and holds on to the fork if it is clean.
- When an eating philosopher receives a request for a fork it registers the request in memory, and continues eating while holding the fork. When an eating philosopher transits to thinking it sends forks for all requests that it received.
What could go wrong?
The proof of safety is straightforward: Neighbors aren't eating because neighbors can't hold the same fork at the same time.Before we look at the proof of progress, let's see what may go wrong.
Could a group of philosophers exchange forks with each other so that
members of the group eat repeatedly, and starve a philosopher who is
not in the group? For example, in the figure below, could philosophers
\(u, v, w\) exchange forks so that they each eat in turn, and starve
\(y\)?
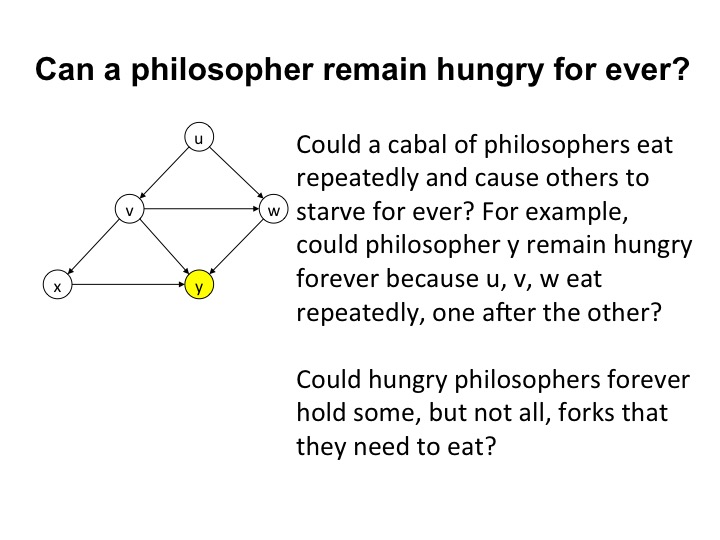
Could the system enter a deadlock state in which each hungry philosopher in a group holds only some --- but not all --- of the forks that it needs to eat, while other members of the group hold the remaining forks?
Proof of Correctness
The algorithm is correct. We are required to prove that every hungery philosopher eats eventually:\( \forall v: \quad v.h \leadsto v.e \)
where for a philosopher \(v\), \(v.h\) holds exactly when \(v\) is hungry and \(v.e\) holds exactly when \(v\) is eating.
Variant Function
To prove this progress property we find a variant function that satisfies the following two conditions:- Safety: The variant function does not increase while \(v\) remains hungry.
- progress: The following predicate does not hold forever: The variant function remains unchanged and \(v\) remains hungry.
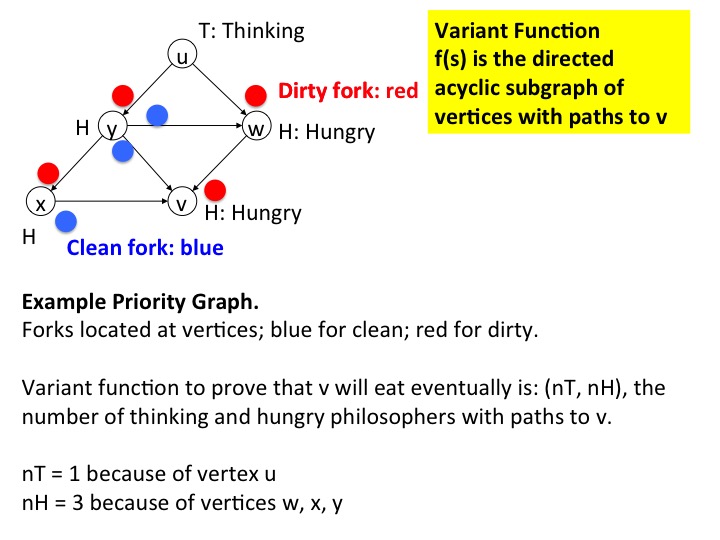
We propose a variant function which is a pair of integers \(nT, nH\), which are the number of thinking and hungry philosophers, respectively, of higher priority than \(v\). In terms of the priority graph, \(nT, nH\) are the numbers of thinking and hungry philosophers (i.e. vertices) with paths to \(v\).
Example of Variant Function
The figure below shows a portion of the priority graph in a state of the system. The figure only shows philosophers with higher priority than philosopher \(v\), i.e., it only shows vertices in the graph with paths to \(v\). Since eating philosophers have lower priority than their neighbors, eating philosophers don't appear in this graph.
A hungry philosopher is marked with an "H" and a thinking philosopher
with a "T." In the diagram, philosophers \(v, w, x, y\) are hungry and
\(u\) is thinking.
Forks are located at philosophers and are shown as small
colored circles. A dirty fork is colored red and clean one is
blue. For example the fork shared by \(v\) and \(y\) is at \(y\) and
is clean.
Example of Changes to Variant Function
The next figure is an example of changes to the variant function. The diagram on the top left shows the higher priority vertices in the state of the previous figure. If agent \(x\) eats next the priority graph transits to the diagram on the top right, and the variant function \((nT, nH)\) changes from \((1, 3)\) to \((1, 2)\).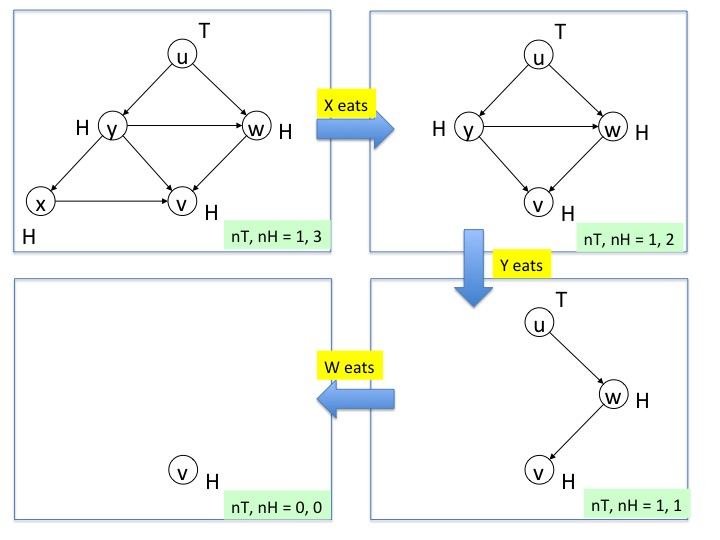
Proof that the variant function does not increase while \(v\) remains hungry
If a philosopher of higher priority than \(v\) transits from thinking to hungry then \(nT\) decreases. Though \(nH\) increases, the variant function \((nT, nH)\) decreases because ordering of function values is done lexicographically.
If a philosopher of higher priority than \(v\) transits from hungry to eating then \(nH\) decreases, and so the variant function \((nT, nH)\) decreases.
Proof that the following predicate does not hold forever: The variant function remains unchanged and \(v\) remains hungry.
Let \(w\) be a highest-priority hungry philosopher, i.e. a philosopher with no hungry philosopher with priority higher than \(w\). (Note: \(w\) may be the same as \(v\).) All philosophers with priority higher than \(w\) are thinking. In the next paragraph we show that either \(w\) gets all its forks and then transits from hungry to eating, or the variant function decreases.
From the algorithm, a hungry philosopher \(w\) requests forks from its neighbors. From the algorithm, \(w\) eventually gets forks from all its lower priority neighbors. A higher priority neighbor \(x\) of \(w\) is thinking. So when \(x\) gets a request for a fork from \(w\) either (1) \(x\) sends the requested fork to \(w\) or (2) \(x\) transits from thinking to hungry in which case the variant function \((nT, nH)\) decreases.
Summary: Key Ideas of this Module
This module introduced the problem of distributed mutual exclusion; showed how the good neighbor policy --- a winning agent reduces its priority to be lower than all the agents that it competes with -- solves this conflict resolution problem; introduced tokens and what agents know about other agents holding tokens; and showed a proof pattern that is one of the most common patterns for proving progress.Review
- What is the meaning of mutual exclusion among neighboring philosophers?
- An invariant of the algorithm is that each token is in exactly one place: an agent or a channel. How does this invariant help in designing the algorithm?
- An invariant of the algorithm is that the relative priorities among agents forms a partial order --- the priority graph is acyclic. What can go wrong if the priority graph has cycles?
- An agent that has a request for a fork releases the fork if the fork is dirty, and holds on to the fork if the fork is clean. What could go wrong if an agent releases a fork when it gets a request, regardless of whether the fork is clean or dirty?
K. Mani Chandy, Emeritus Simon Ramo Professor, California Institute of Technology